
F.R.O.S.T.
Fast Rescue Operation Snow Tool (FROST) is a mechanical snow digging device designed to rapidly remove snow in avalanche rescue operations. The tool offers a lightweight and portable design which allows rescuers to reduce the time and labor spent in victim extraction.
With recent advances in avalanche victim location technology, a bottleneck in avalanche rescue was exposed: victim extraction. When a victim is buried in up to 6 feet of snow, rescuers have to move literal tons of snow to unbury them. This is the reason we chose to try and innovate a digging tool for rescuers to utilize.
The device works using a powerful brushless DC motor, which interfaces with our custom made end effector. Using various testing and simulations we were able to develop the optimal end effector design, which digs effectively and keeps safety in mind.
Motivation
Our project was motivated by the need for a faster, safer, and more portable solution for avalanche rescue. In time critical situations, current methods often rely on manual digging or large equipment, both of which can significantly delay victim recovery. We aimed to address this gap by creating a device that improves digging efficiency while remaining lightweight, easy to deploy, and safe to use on a buried victim.
Traditionally in avalanche rescue, tools like collapsible snow shovels and avalanche rescue dogs are primarily used in victim extraction. These methods are labor intensive and slow when a victim is buried underneath tons of snow. Mechanical digging solutions like snowblowers and snowcats exist, however, are ineffective in avalanche rescue situations. Snowblowers excel at clearing light fresh snow in flat areas, but are ineffective and bulky when used in mountainous terrain with condensed snow. Snowcats excel at clearing snow in mountainous terrain with condensed snow, but are too slow for avalanche response and would likely harm the victim if used in extraction.
F.R.O.S.T. differentiates itself by combining the portability of handheld tools with a more efficient digging mechanism. Unlike traditional tools, it is designed specifically for rescue scenarios, prioritizing controlled snow displacement, user ergonomics, and safety for the victim. This allows for a faster excavation while reducing the risk of injury, making it a more effective solution for avalanche response.




User Experience



2025
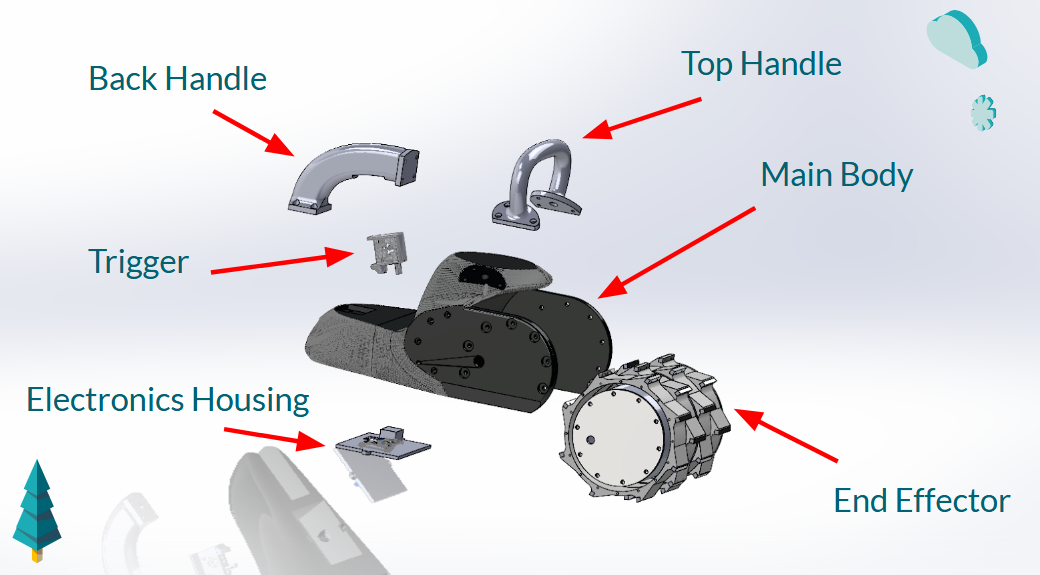
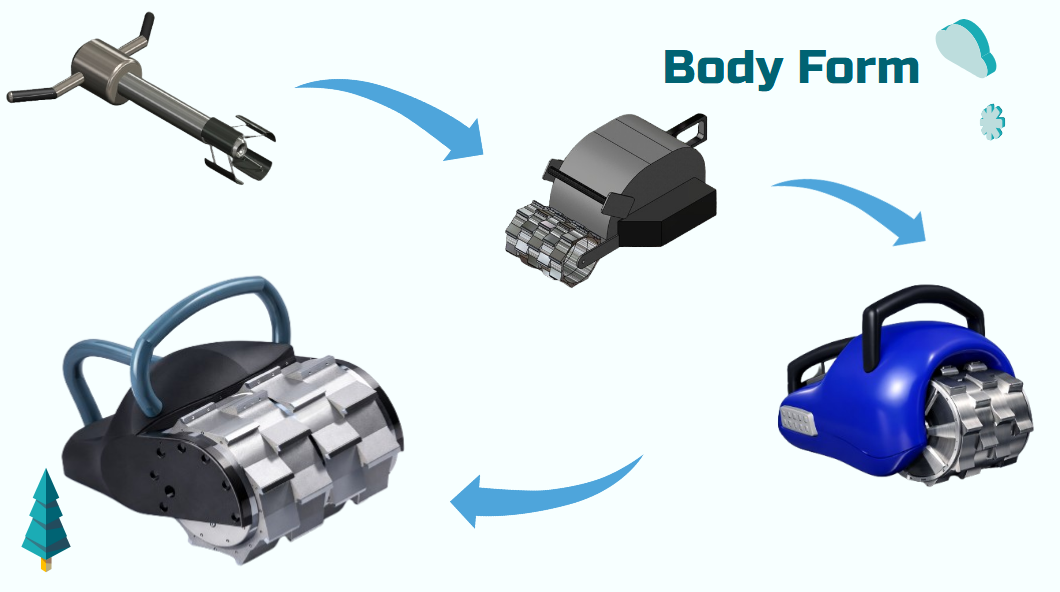
After developing a more clear idea of the overall form, we moved on to creating 3D models. We still wanted flexibility to adjust shape and proportions, so we began by modeling in Blender. While this did not allow for precise dimensioning or manufacturable features, it enabled us to iterate quickly on the overall design and aesthetics . Once we finalized the visual look, we imported the mesh into SolidWorks.
In SolidWorks, we reworked the model into a manufacturable design by adding accurate dimensions, defining screw patterns, and finalizing the overall structure of the device.
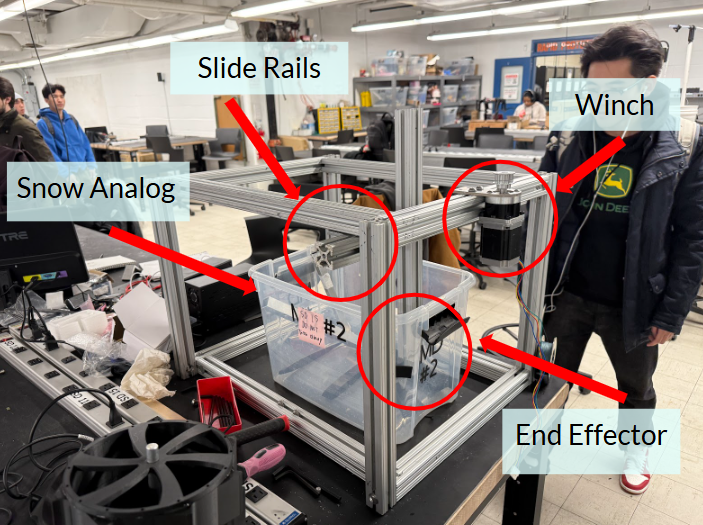
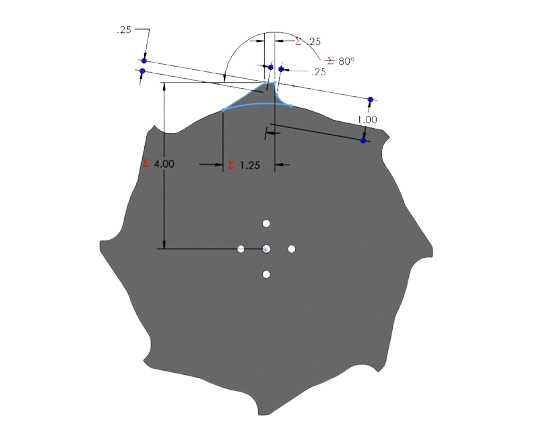
Using parametric CAD in SolidWorks, we also designed the end effectors used for digging. To ensure the best possible design, we developed a quantitative analysis using a custom testing bench. We varied three key features of the end effector to determine the optimal configuration: rake angle, tooth height, and tooth count.
The testing bench was built from metal extrusions and used a pulley system to drag the end effector across a bed of wet sand. Wet sand was chosen because it served as a strong analog for snow without the issue of melting throughout multiple days of testing.
Motor Housing
Electronics
Integration
Body Design
Our prototyping for F.R.O.S.T. began with sketches and laser cut models to explore the overall form and shape. Since portability was a key requirement, we focused on making the design easy to handle and ergonomic for extended use. By testing weight distribution and handle placement, and by building a V0 prototype, we developed a solid base design to iterate from.
The laser cut model was created by sketching individual components in vector graphics software and assembling them into a 3D form. Because we were focused on proportions and overall form, laser cutting allowed for fast and flexible prototyping.
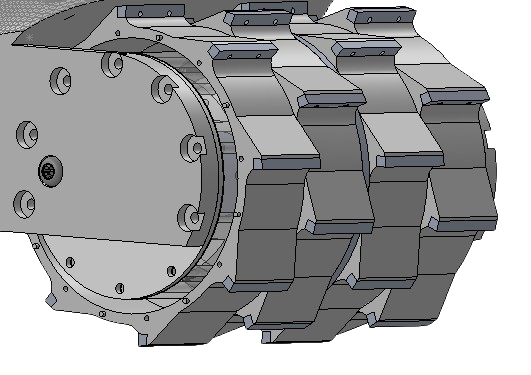
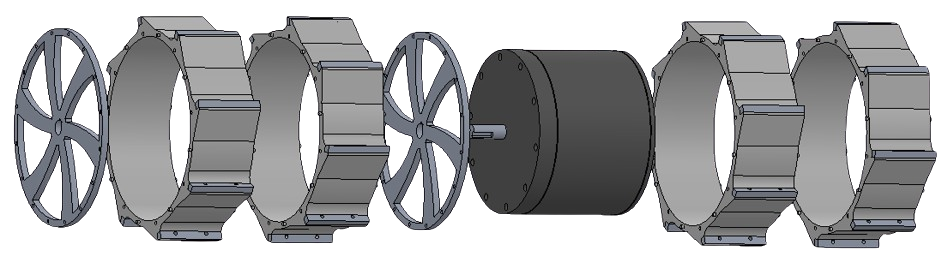
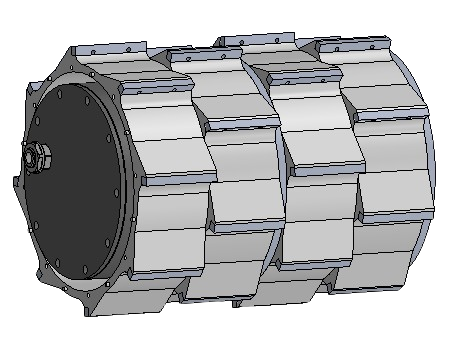
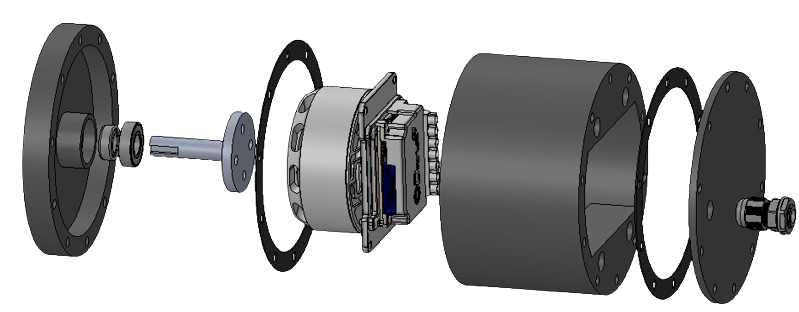
To achieve a more compact overall design and free up space for the onboard electronics and battery, we integrated the motor directly into the end effector. This choice reduced the space in the body but also introduced new environmental challenges, particularly exposure to moisture and debris. To address this, we designed a dedicated motor housing that is both waterproof and mechanically robust. The enclosure seals using a gasket interface to prevent water leaking in, while also incorporating features to regulate internal humidity and mitigate condensation buildup, ensuring reliable motor performance in wet operating conditions.
End Effector Testing
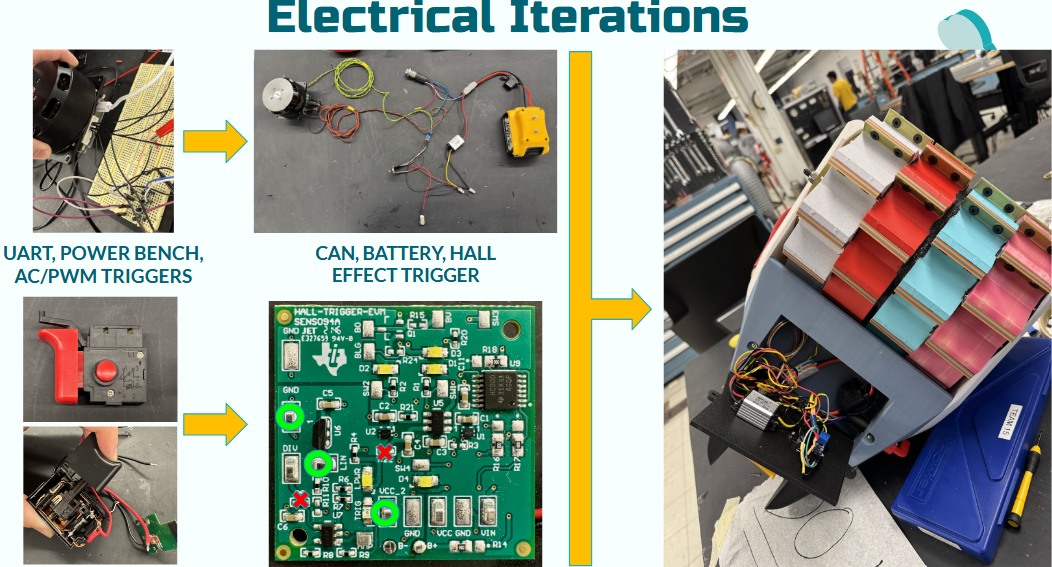
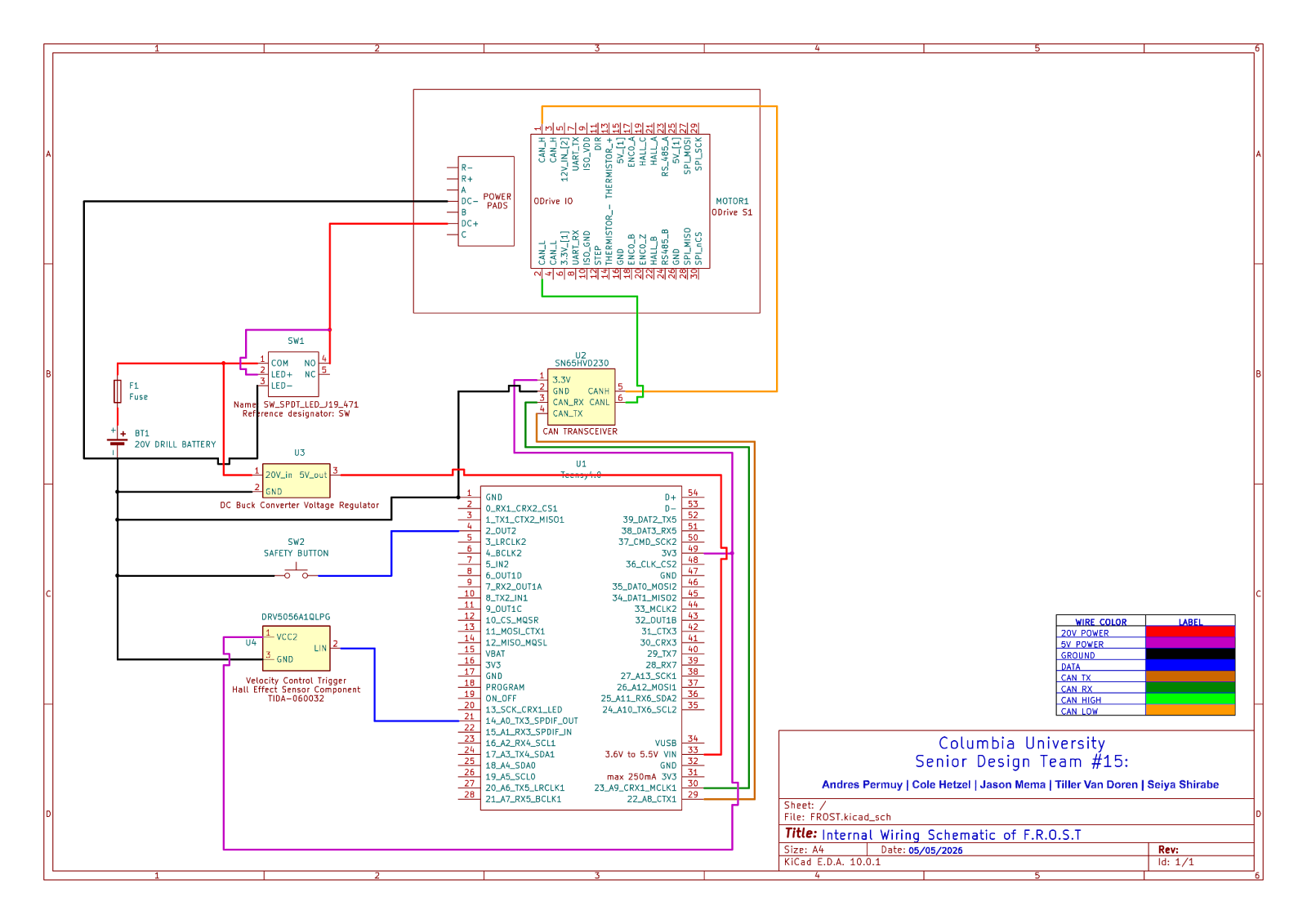
For the electronics system, we focused on creating a compact, robust, and field ready architecture that could support both high power draw for the motor and sensitive microcontroller hardware. Power is supplied by an adapted drill battery, which allows for quick swapping and easy recharging, making the system much more practical for rescuers to use. From this main power source, a buck converter is used to step down the voltage to appropriate levels for the lower power electronics, this ensures a safe and stable operation.
At the core of the system is a Teensy microcontroller, which handles control logic and communication. We implemented the CAN protocol to enable reliable and noise resistant communication between components. This is especially important given the electrical noise environment created by the motor. The motor itself is driven using an ODrive controller, allowing for precise control over speed and torque while keeping a high performance.
For user interaction and safety, we integrated both a dedicated safety button and a trigger input. The trigger required a custom solution, as off the shelf options did not work with DC. To address this, we bought and modified a custom switch using a Hall effect sensor, which outputs a continuous signal based on trigger position. This allows for speed control of the motor rather than a on/off mode, improving the controllability and user experience.
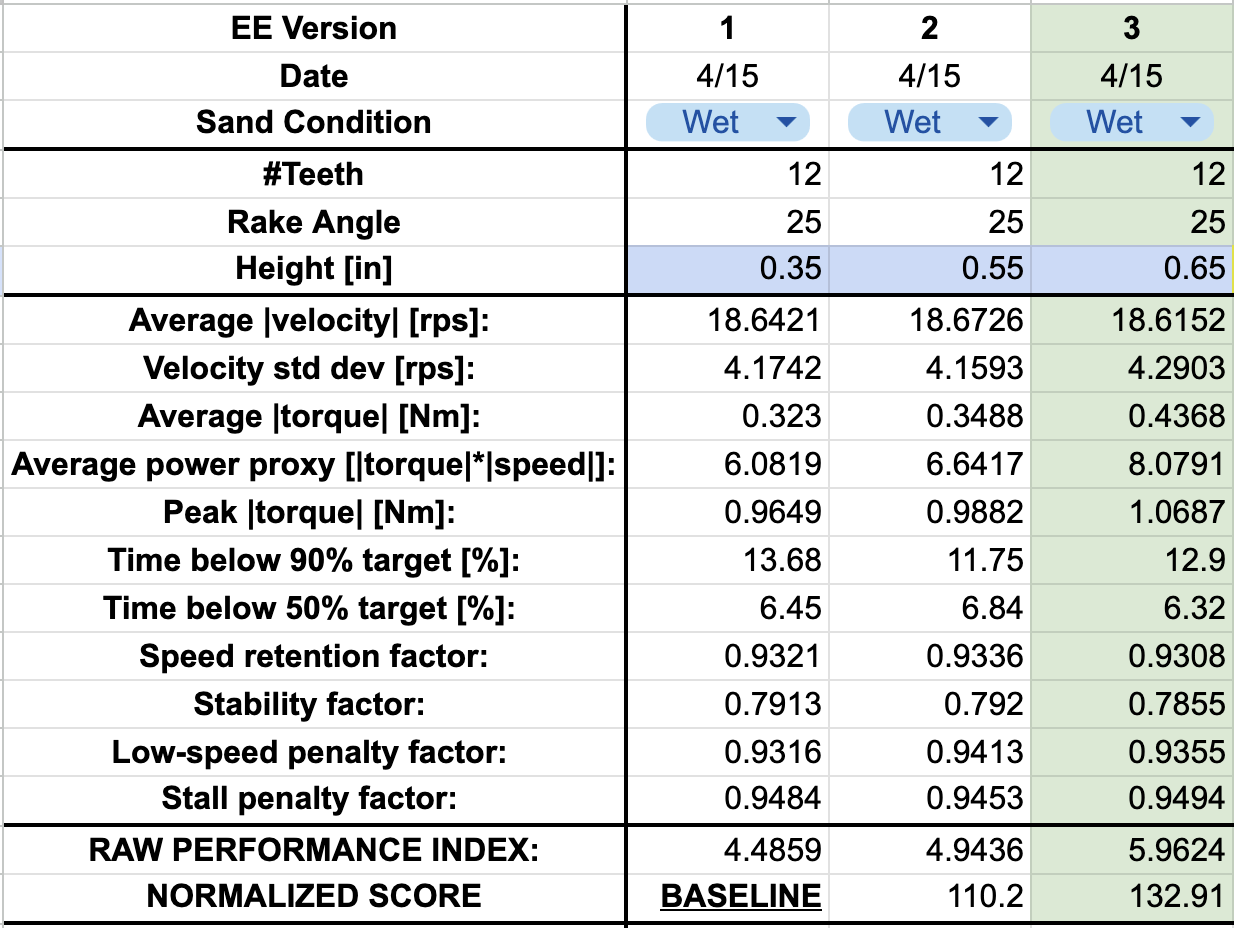
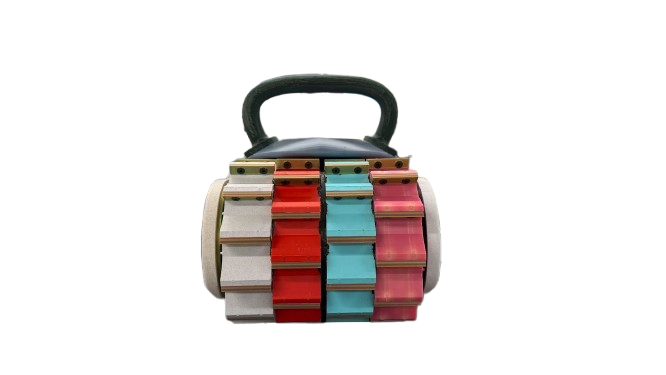
We conducted end effector testing under consistent wet sand conditions to evaluate how variations in geometry impacted performance. Through iterative trials, we determined that a configuration with 12 teeth and a 25° rake angle provided the most effective baseline for material interaction. From there, we varied tooth height to isolate the impact, testing multiple configurations while tracking metrics such as velocity, torque, power proxy, and stability. The results showed that the design with a 0.65 in tooth height (third configuration) performed the best, achieving the highest normalized score and overall performance .


Our Team
Seiya Shirabe is a senior Mechanical Engineering student at Columbia University, and has also received a degree in Engineering/Economics from Claremont McKenna College. His interests focus on creative technology, particularly in developing immersive experiences that bring together engineering, art, and entertainment. He aims to build innovative, experience driven systems that push the boundaries of themed entertainment and interactive design
Tiller Van Doren is a fifth-year Mechanical Engineering and Physics combined plan student with a minor in Aerospace Engineering. His current goal is to work in industry as a mechanical engineer and eventually pursue a PHD in physics.
Andres Permuy is a fourth-year Mechanical Engineering undergraduate and first-year Robotics & Controls graduate student at the Columbia University SEAS. In 2024, he received a Bachelor of Science in Physics with a minor in Mathematics from Georgetown University. His current goal is to work with automation that can be utilized in the space industry for ISAM capabilities, orbital debris mitigation, and extraterrestrial exploration.



Cole Hetzel is a fourth-year Mechanical Engineering undergraduate and Aerospace Engineering minor at Columbia SEAS. Cole previously attended DePauw University, where he earned a B.A. in Pre-Engineering, and is soon to begin a M.S. in Aerospace Engineering at the Georgia Institute of Technology this fall. Cole's professional interests include propulsion and space infrastructure.
Jason Mema is a mechanical engineering student at Columbia University with an applied mathematics background from American University. He enjoy hands-on engineering work and has experience taking projects from design through testing, both in academic teams and during their internship as a naval engineer. They are particularly interested in aerospace applications involving structures, propulsion, materials, and manufacturing.

